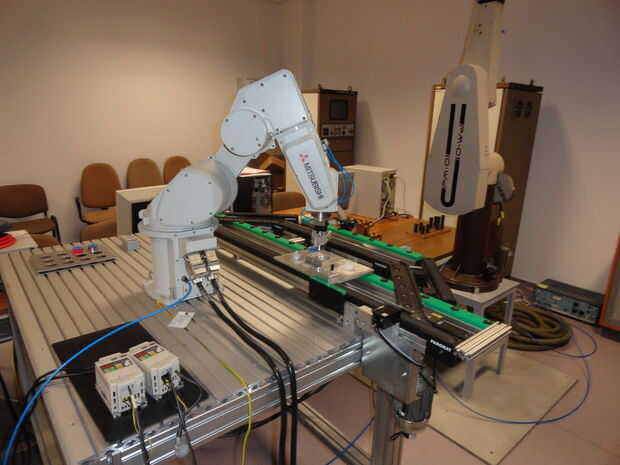
In this second week of the challenge we have planned to end the programming of the two panels and put into programs the part of the mitsubishi robot. The mitsubishi part we still can't start because the robot is missing a battery that has been removed by the teacher and until stack arrives we can't do anything about it. Besides, we're already finishing the vision exercises. In this challenge we have organized ourselves better.
This week we have had to come in the afternoon to recover some exercise from the previous challenge, but during the day we have to go ahead of the challenge work in which we are now, I personally have to go to work with which I have less time than my peers to do things in class, for now we go well in this challenge so let's hope to continue like this to arrive on time, on December 5th we have to have everything delivered so that the teachers can correct it and put the notes corresponding to each.

 The challenge we are currently working on the mitsubishi robot, we havent actually started programming it but, we have a lot of stuff on our hands. We don´t have an exam, so that is nice, we can focus on the project and not worry about anything else.
The challenge we are currently working on the mitsubishi robot, we havent actually started programming it but, we have a lot of stuff on our hands. We don´t have an exam, so that is nice, we can focus on the project and not worry about anything else.We didn´t get the score we wanted on the ABB robot, but we all still passed, so I am still proud of my team, and I hope we can all be together at the end of the year.
We believe that in this challenge we are better organized than in the previous one. We are better distributing the work according to the qualities of each one, since in the previous one we assigned the jobs in such a way that we end up as headless chickens.
We're doing what we talked about at the last meeting we did and it looks like the whole new organization is going really well.
We believe that if we continue like this in the other challenges everything will be fine.